Getting Started with PID Tuning
April 27, 2026
Introduction
PID (Proportional-Integral-Derivative) controllers are the workhorse of industrial process control. Despite decades of advances in advanced control, ~90% of industrial control loops still use some form of PID. This tutorial walks through three classic tuning methods using our interactive control_utils toolkit.
Download the Toolkit
All code in this tutorial comes from control_utils.py. You can:
- Download
control_utils.pyand use it in your own notebooks - Try the interactive PID Tuner to see these concepts in action
The Process Model: FOLPD
Before tuning any controller, we need a model of the process. The First-Order Lag Plus Deadtime (FOLPD) model is the industry standard:
| Parameter | Meaning | How to Identify |
|---|---|---|
| Process gain | Steady-state output change per unit input change | |
| Time constant | Time to reach ~63% of final value after delay | |
| Dead time | Transport delay before response begins |
Identifying Parameters from Step Response
The FOLPD class in control_utils.py can identify , , and directly from measured step response data:
from control_utils import FOLPD
# t and y are measured step response arrays
plant = FOLPD.from_step_response(t, y, method='tangent')
print(plant) # G(s) = 2.0 * exp(-1.0s) / (5.0s + 1)The from_step_response method uses the tangent at inflection point (classic Z-N approach) or the two-point method (28.3% and 63.2% amplitude points) to fit the parameters:
class FOLPD:
"""First-Order Lag Plus Dead-time process model.
Transfer function: G(s) = K * exp(-L*s) / (T*s + 1)
Can also be constructed from step response data via:
FOLPD.from_step_response()
"""
def __init__(self, K: float, T: float, L: float):
if T <= 0:
raise ValueError(f"Time constant T must be positive, got {T}")
self.K = K
self.T = T
self.L = L
@staticmethod
def from_step_response(t, y, method='tangent'):
"""Identify FOLPD parameters from open-loop step response data."""
y_ss = y[-1] # Steady-state value
y0 = y[0] # Initial value
K = y_ss - y0 # Process gain
# ...inflection point analysis for T and LOpen-Loop Step Response
Here is the open-loop step response for a typical process with , s, s:
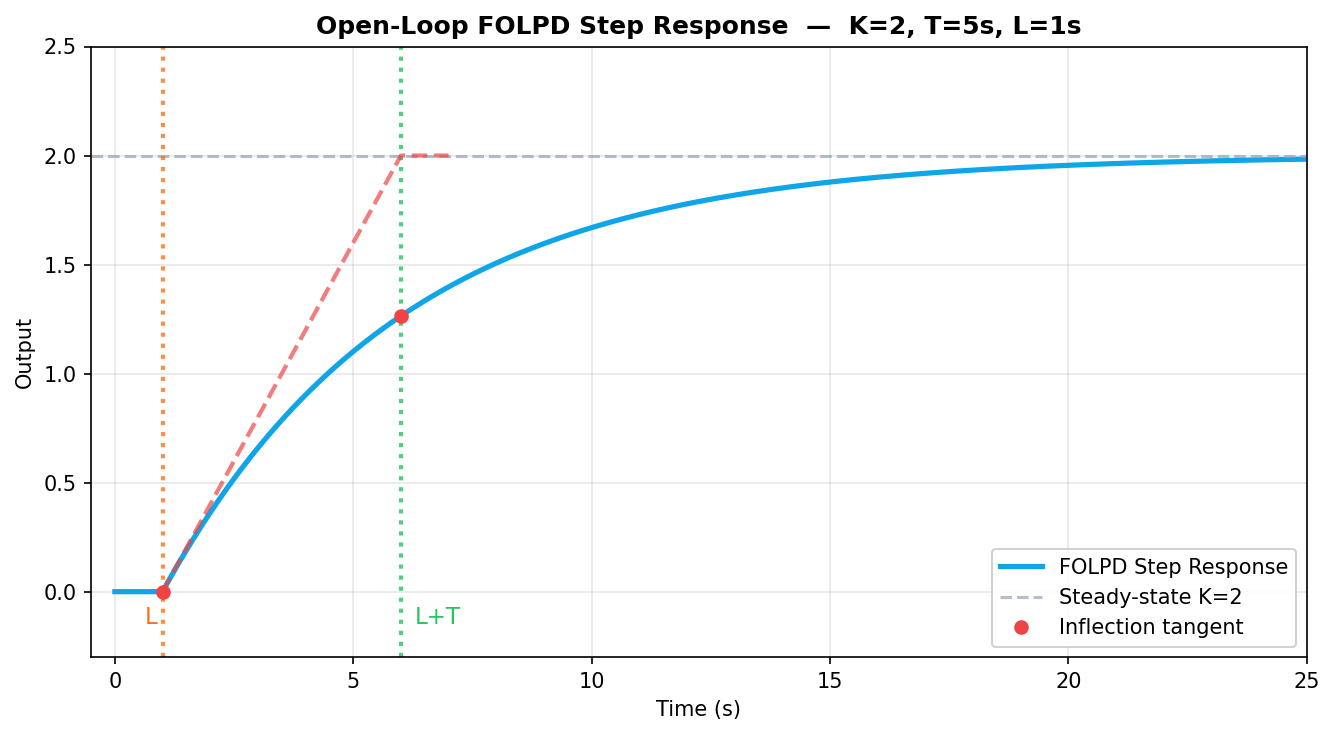
Notice how the output stays at zero for s (dead time), then rises as an exponential curve approaching the steady-state gain . The time constant governs how fast the exponential rises.
Method 1: Ziegler-Nichols Reaction Curve
The classic Ziegler-Nichols open-loop tuning method uses the FOLPD model parameters , , and to calculate PID gains:
Code
from control_utils import FOLPD, PIDGains
plant = FOLPD(K=2.0, T=5.0, L=1.0)
gains = plant.ziegler_nichols_tuning('PID')
print(gains) # PIDGains(kp=3.00, ki=1.50, kd=1.50)The implementation in control_utils.py:
def ziegler_nichols_tuning(self, controller_type='PID'):
R = self.K / self.T # Reaction rate (slope of tangent at inflection)
L = self.L
if controller_type == 'P':
return PIDGains(kp=self.T / (self.K * L))
elif controller_type == 'PI':
return PIDGains(kp=0.9 * self.T / (self.K * L),
ki=0.9 * self.T / (self.K * L) / (3.33 * L))
else: # PID
kp = 1.2 * self.T / (self.K * L)
ki = 1.2 * self.T / (self.K * L) / (2 * L)
kd = 1.2 * self.T / (self.K * L) * (0.5 * L)
return PIDGains(kp=kp, ki=ki, kd=kd)Characteristics
- Fast response, ~25% overshoot typical
- Aggressive — good for setpoint tracking
- Can be oscillatory if is large (dead time dominant)
Method 2: Cohen-Coon Tuning
Cohen-Coon improves on Z-N for processes with significant dead time by accounting for the controllability ratio :
Code
gains = plant.coon_cohen_tuning('PID')
print(gains) # PIDGains(kp=3.45, ki=0.67, kd=1.73)The coon_cohen_tuning implementation:
def coon_cohen_tuning(self, controller_type='PID'):
r = self.L / self.T # Controllability ratio
K = self.K
if controller_type == 'P':
return PIDGains(kp=(1 / K) * (r + 1 / 3))
elif controller_type == 'PI':
return PIDGains(kp=(1 / K) * (0.9 / r + 0.083),
ki=(1 / K) * (0.9 / r + 0.083) /
(3.33 * self.L + 0.333 * self.T))
else: # PID
kp = (1 / K) * (1.33 / r + 0.25)
ki = kp / (2.67 * self.L + 0.5 * self.T)
kd = kp * (0.5 * self.L)
return PIDGains(kp=kp, ki=ki, kd=kd)Characteristics
- Reduced overshoot compared to Z-N
- Better disturbance rejection
- More robust for processes
Method 3: Internal Model Control (IMC)
IMC provides explicit robustness-performance trade-off through the closed-loop time constant :
Code
gains = plant.imc_tuning(tau_c=1.0) # conservative
print(gains)The imc_tuning implementation:
def imc_tuning(self, tau_c=None):
if tau_c is None:
tau_c = max(self.L, 0.1 * self.T)
Kp = (self.T + self.L / 2) / (self.K * tau_c)
Ki = Kp / (self.T + self.L / 2)
Kd = self.T * self.L / (2 * (self.T + self.L / 2))
return PIDGains(kp=Kp, ki=Ki, kd=Kd)Choosing
| Behavior | Best For | |
|---|---|---|
| Aggressive | Fast servo tracking, low noise | |
| Balanced | General purpose | |
| Conservative | Noisy measurements, model uncertainty |
Visual Comparison
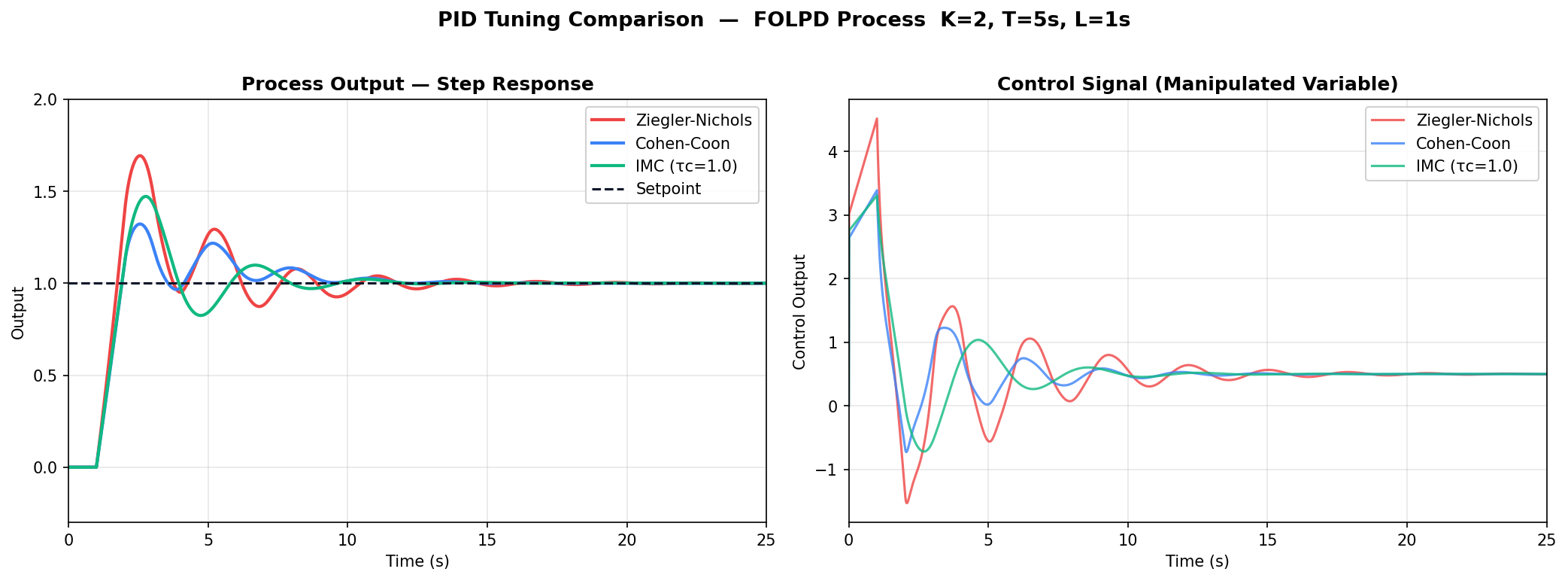
For the reference process , the three methods produce markedly different closed-loop responses:
Side-by-Side Comparison
Individual Responses (Zoomed)
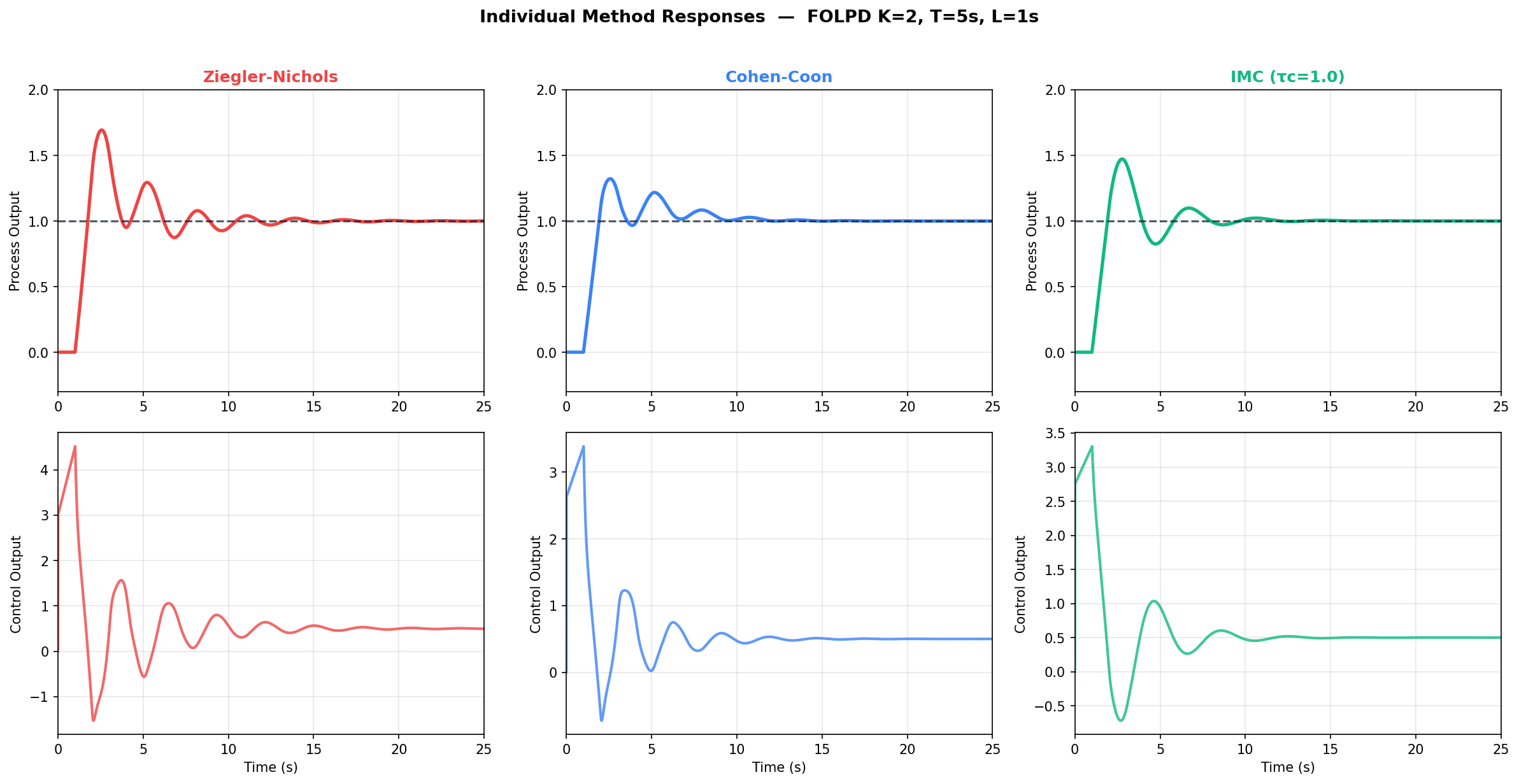
From the plots, observe three distinct behaviors:
| Method | Kp | Ki | Kd | Overshoot |
|---|---|---|---|---|
| Ziegler-Nichols | 3.00 | 1.50 | 1.50 | 69% |
| Cohen-Coon | 3.45 | 0.67 | 1.73 | 40% |
| IMC (τc=1) | 2.75 | 0.55 | 0.45 | 47% |
- Z-N: Fastest rise time, highest overshoot (~70%), most oscillatory. The aggressive integral gain causes pronounced ringing. Good for fast setpoint tracking when overshoot is acceptable.
- Cohen-Coon: Reduced overshoot vs. Z-N (~32%). Better balance between speed and stability. Good general-purpose choice.
- IMC: Despite a moderate overshoot (~47%), it settles smoothly with the least oscillation and gentlest control effort. Lower proportional gain means less aggressive recovery — best for robustness when model uncertainty exists.
The PID Controller Implementation
The control_utils.py module includes a full-featured PID controller implementation used to generate the plots above:
class PIDController:
"""PID controller with anti-windup and derivative filtering.
Features:
- Integral anti-windup (back-calculation)
- Derivative on measurement (avoids derivative kick)
- Low-pass filter on derivative term
- Bumpless transfer for gain changes
"""
def __init__(self, gains, dt, output_limits=(-np.inf, np.inf)):
self.gains = gains
self.dt = dt
self.output_min, self.output_max = output_limits
self.integral = 0.0
self.prev_measurement = None
self.prev_derivative = 0.0
def update(self, setpoint, measurement):
error = setpoint - measurement
p_term = self.gains.kp * error
# Integral with anti-windup
self.integral += error * self.dt
i_term = self.gains.ki * self.integral
# Derivative on measurement (not error) + filter
if self.prev_measurement is not None:
d_raw = -(measurement - self.prev_measurement) / self.dt
alpha = self.dt / (self.gains.tau_d + self.dt)
d_filtered = alpha * d_raw + (1 - alpha) * self.prev_derivative
self.prev_derivative = d_filtered
d_term = self.gains.kd * d_filtered
else:
d_term = 0.0
self.prev_measurement = measurement
# Clamp and back-calculate
output = np.clip(p_term + i_term + d_term,
self.output_min, self.output_max)
if self.gains.ki != 0:
sat_err = output - (p_term + i_term + d_term)
self.integral += sat_err / self.gains.ki
return outputSummary Table
| Method | Complexity | Overshoot | Robustness | Best Use Case |
|---|---|---|---|---|
| Z-N | Low | High | Low | Quick tuning, approximate |
| Cohen-Coon | Low | Medium | Medium | Dead-time dominant |
| IMC | Medium | Low | High | Robust performance, tunable |
Next Steps
- Try the interactive PID Tuner with your own process parameters
- Read about PID Tuning with Relay Feedback for a model-free auto-tuning approach
- Experiment with the
control_utils.pytoolkit in your own Jupyter notebooks
References
- Åström, K.J., & Hägglund, T. (2006). Advanced PID Control. ISA.
- Seborg, D.E., Edgar, T.F., Mellichamp, D.A., & Doyle, F.J. (2011). Process Dynamics and Control (3rd ed.). Wiley.
- Rivera, D.E., Morari, M., & Skogestad, S. (1986). Internal Model Control. Ind. Eng. Chem. Process Des. Dev., 25(1), 252–265.